Попередня сторінка: 7.3. Крокові двигуни
Наступна сторінка: 8.1. Електромагнітні та електричні прис...
Зміст
7.4.1. Загальні відомості. Мікродвигуни постійного струму
7.4.2. Інформаційні електричні мікромашини
7.4.1. Загальні відомості. Мікродвигуни постійного струму
Електричні машини невеликої потужності (до 700 Вт) називаються мікро-машинами. Ці машини відзначаються значною різноманітністю їхніх типів. Розглянемо мікромашини, що є найбільш поширеними.
Мікродвигуни постійного струму
Мікродвигуни постійного струму застосовують в автоматичних пристроях і використовують для обертання різних механізмів і перетворення електричного сигналу в механічне переміщення валу. В останньому випадку їх називають виконавчими двигунами постійного струму.
Мікродвигуни постійного струму, які застосовують в автоматичних пристроях, бувають із збудженням від постійних магнітів, із повним ротором, безпазовим якорем, печатною обмоткою якоря, напівпровідниковими регуляторами швидкості обертання, безнитковими і універсальними колекторами.
У сучасних автоматичних пристроях застосовують, головним чином, виконавчі двигуни з якірним управлінням і тільки в окремих випадках (при малій потужності двигуна) використовують полюсне управління.
У пристроях автоматики і різних електропобутових приладах широко застосовують універсальні колекторні двигуни потужністю від декількох ватів до декількох сотень ватів, що можуть працювати від джерел як постійного струму, так і однофазного струму.
Електромашинні підсилювачі (ЕМП)
ЕМП застосовують у схемах автоматики для підсилення керуючих сигналів, одержуваних від різних датчиків, сельсинів, поворотних трансформаторів та інших пристроїв.
ЕМП є спеціальними електричними генераторами постійного або змінного струму, вихідна потужність яких може змінюватися в широких межах шляхом зміни потужності управління. Відношення вихідної потужності до потужності управління називають коефіцієнтом підсилення за потужністю. Сучасні ЕМП мають дуже великі коефіцієнти підсилення, необхідні для підсилення порівняно слабких керуючих сигналів.
Найпростішим ЕМП є звичайний генератор постійного струму з незалежним збудженням, у якого потужність, що подається на обмотку збудження (управління), у багато разів менша від потужності, яку одержують на виході
від обмотки якоря. Посилення потужності в цій машині відбувається за рахунок механічної енергії, яка поступає від приводного двигуна, що є характерним і для всіх інших ЕМП.
7.4.2. Інформаційні електричні мікромашини
Інформаційні електричні мікромашини призначені для виконання функцій первинних перетворювачів, передачі інформації та ін. Як первинні перетворювачі вони служать для перетворення різних механічних величин (кута повороту, частоти обертання, швидкості переміщення, прискорення, моменту та ін.) в електричні та величини зворотного перетворення; в обчислювальній техніці виконують розв'язування тригонометричних задач, перетворення координат, диференціювання, інтегрування; у телемеханічних системах забезпечують роботу систем синхронного зв'язку.
На сьогодні розроблено, створено та експлуатується велика кількість різних типів електричних мікромашин, призначених для виконання зазначених функцій: тахогенератори, сельсини, поворотні (обертові) трансформатори тощо.
Тахогенератори
Слово «тахогенератор» походить від двох слів - грецького «тахос», що означає «швидкий», і латинського «генератор». Тахогенератор є вимірювальною електричною мікромашиною змінного або постійного струму, яка монтується на вал обладнання і перетворює поточне значення частоти обертання валу в електричний сигнал, певний параметр якого несе інформацію про частоту обертання.
Таким параметром може виступати величина ЕРС, що генерується або значення частоти сигналу. Вихідний сигнал з тахогенератора може подаватися на засіб візуального відображення (наприклад, на дисплей) або на пристрій автоматичного управління частотою обертання валу.
Тахогенератори бувають декількох типів, залежно від виду сигналу, що генерується на виході: із сигналом змінної напруги або струму (асинхронні або синхронні тахогенератори), із сигналом постійного струму.
На рис. 7.13 зображено тахогенератор змінного струму.
Тахогенератори - мікромашини, вихідна ЕРС яких пропорційна кутовій швидкості ротора. Оскільки в електричних машинах ЕРС, що генерується, пропорційна швидкості ротора, то тахогенератором може бути будь-який тип електричного генератора - синхронний, асинхронний, постійного струму тощо.
У схемах автоматики найпоширенішими є асинхронні тахогенератори і тахогенератори постійного струму.

Сельсини
Найпростіший сельсин складається із статора з трифазною обмоткою (схема включення в електричний ланцюг - «трикутник» або «зірка») і ротора з однофазною обмоткою. Його загальний вигляд зображено на рис. 7.14.

За допомогою сельсинів можна побудувати два типи передач - індикаторну й вимірювальну (трансформаторну).
Для дистанційної передачі кута використовується електромеханічне устаткування - синхронна передача. Вона складається з датчика, приймача та лінії зв'язку між ними.
Два таких пристрої електрично з'єднуються один з одним однойменними виводами - статор зі статором і ротор із ротором. На ротори подається змінна напруга від одного джерела. При цьому обертання ротора одного сельси-на викликає поворот ротора іншого сельсина. На рис. 7.15 зображено схему підключення сельсинів в індикаторному режимі.
У такій схемі кожному положенню вала датчика відповідає цілком визначене положення вала приймача.

У трансформаторній синхронній передачі (рис. 7.16) обмотка збудження сельсина-датчика увімкнена до мережі змінного струму. Вторинні ЕРС є електричними сигналами, які передаються в колі синхронізації від датчика (СД) до приймача (СП).
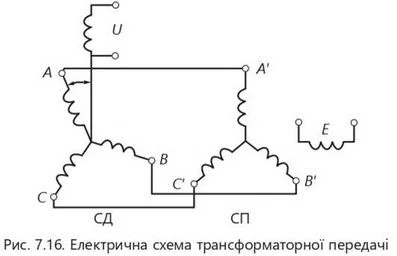
У приймачі трифазна обмотка створює магнітний потік, вісь якого займає стосовно неї таке саме положення, як і у датчика. При повороті ротора датчика на такий самий кут повертається магнітний потік приймача. Цей кут повороту можна зафіксувати за величиною ЕРС однофазної обмотки приймача.
За допомогою сельсинів, які перебувають у трансформаторному режимі, здійснюється дистанційне безперервне керування електроприводами.
КОНТРОЛЬНІ ЗАПИТАННЯ
1. Що таке електрична машина змінного струму? Опишіть конструкцію такої машини.
2. Що таке генератор постійного струму? Опишіть його конструкцію.
3. Які існують види збудження генераторів постійного струму?
4. Що таке двигун постійного струму?
Б. Як визначити коефіцієнт корисної дії двигуна?
6. Що є характерним для асинхронних однофазних і двофазних двигунів?
7. Що таке ковзання асинхронного двигуна?
8. Що являє собою трифазний асинхронний двигун?
9. Як підключити трифазний асинхронний двигун у однофазну мережу?
10. Назвіть переваги з'єднання «зіркою».
11. Поясніть відмінність між фазною і лінійною напругою при з'єднанні трикутником.
12. Які бувають види електричних двигунів і чим вони відрізняються?
13. Опишіть будову крокового двигуна.
14. Як змінити напрям обертання двигуна постійного струму?
15. Як змінити швидкість і напрям обертання ротора асинхронного двигуна?
16. Яке призначення інформаційних електричних машин?
17. Поясніть особливості використання сельсинів.
Це матеріал з підручника "Електротехніка та основи електроніки" Гуржій 2020
Наступна сторінка: 8.1. Електромагнітні та електричні прис...